

RESEARCH TRIANGLE PARK, N.C. — Modeling the mechanics of the strongest punch in the animal kingdom, researchers with U.S. Army funding built a robot that mimics the movement of the mantis shrimp. These pugnacious crustaceans could pave the way for small, but mighty robotic devices for the military.
Researchers at Harvard University and Duke University, published their work in Proceedings of the National Academy of Sciences. They shed light on the biology of mantis shrimp, whose club-like appendages accelerate faster than a bullet out of a gun. Just one strike can knock the arm off a crab or break through a snail shell. These crustaceans have even taken on an octopus and won.
“The idea of a loaded spring released by a latch is a staple in mechanical design, but the research team cleverly observed that engineers have yet to achieve the same performance out of a Latch-Mediated Spring Actuator that we find in nature,” said Dr. Dean Culver program manager, U.S. Army Combat Capabilities Development Command Army Research Laboratory. “By more closely mimicking the geometry of a mantis shrimp’s physiology, the team was able to exceed accelerations produced by limbs in other robotic devices by more than tenfold.”

How mantis shrimp produce these deadly, ultra-fast movements has long fascinated biologists. Recent advancements in high-speed imaging make it possible to see and measure these strikes, but some of the mechanics have not been well understood.
Many small organisms, including frogs, chameleons, and even some kinds of plants, produce ultra-fast movements by storing elastic energy and rapidly releasing it through a latching mechanism, like a mouse trap. In mantis shrimp, two small structures embedded in the tendons of the muscles called sclerites act as the appendage’s latch. In a typical spring-loaded mechanism, once the physical latch is removed, the spring would immediately release the stored energy, but when the sclerites unlatch in a mantis shrimp appendage, there is a short but noticeable delay.
“When you look at the striking process on an ultra-high-speed camera, there is a time delay between when the sclerites release and the appendage fires,” said Nak-seung Hyun, a postdoctoral fellow at Harvard John A. Paulson School of Engineering and Applied Sciences and co-first author of the paper. “It is as if a mouse triggered a mouse trap, but instead of it snapping right away, there was a noticeable delay before it snapped. There is obviously another mechanism holding the appendage in place, but no one has been able to analytically understand how the other mechanism works.”
Biologists have hypothesized that while the sclerites initiate unlatching, the geometry of the appendage itself acts as a secondary latch, controlling the movement of the arm while it continues to store energy. But this theory had not yet been tested.
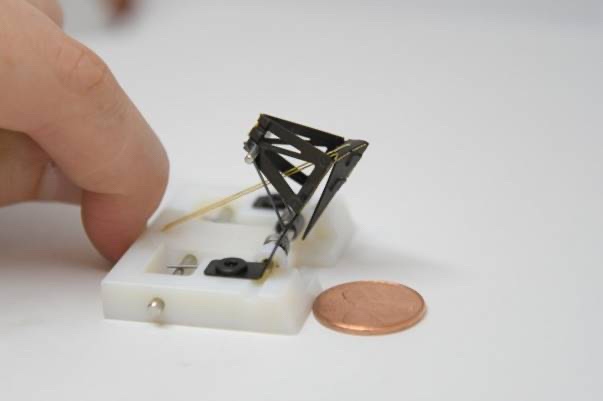
The research team tested this hypothesis first by studying the linkage mechanics of the system, then building a physical, robotic model. Once they had the robot, the team was able to develop a mathematical model of the movement. The researchers mapped four distinct phases of the mantis strike, starting with the latched sclerites and ending with the actual strike of the appendage. They found that, indeed, after the sclerites unlatch, geometry of the mechanism takes over, holding the appendage in place until it reaches an over-centering point and then the latch releases.
“This process controls the release of stored elastic energy and actually enhances the mechanical output of the system,” said Emma Steinhardt, a graduate student at Harvard John A. Paulson School of Engineering and Applied Sciences and first author of the paper. “The geometric latching process reveals how organisms generate extremely high acceleration in these short duration movements, like punches.”
The device is faster than any similar devices at the same scale to date.
“This study exemplifies how interdisciplinary collaborations can yield discoveries for multiple fields,” said co-author Dr. Sheila Patek, professor of biology at Duke University. “The process of building a physical model and developing the mathematical model led us to revisit our understanding of mantis shrimp strike mechanics and, more broadly, to discover how organisms and synthetic systems can use geometry to control extreme energy flow during ultra-fast, repeated-use, movements.”
This approach of combining physical and analytical models could help biologists understand and roboticists mimic some of nature’s other extraordinary feats, such as how trap jaw ants snap their jaws so quickly or how frogs propel themselves so high.
“Actuator architecture like this offers impressive capabilities to small and lightweight mechanisms that need to deliver impulsive forces for the Army,” Culver said. “But I think there’s a broader takeaway here – something the engineering community and defense research can keep in mind. We’re not done learning about mechanical performance from nature and biological systems. Things we take for granted, like a simple sprung actuator, are still ripe for further investigation at many scales.”
By U.S. Army DEVCOM Army Research Laboratory Public Affairs
Long story short, they have a safety latch and trigger?