
Optics 1 has introduced a Remote Operating System (ROS) mount which works as an interface between its sensors like the High Resolution Thermal Video Imaging System (HRTV) and a tripod or other base.

The ROS is a combination of hardware and software, offering pan and tilt. It is completely wireless and can be controlled via the tablet shown here or via a software interface which connects to the ROS via IP address. As you can see, it provides full control of the sensor as well.
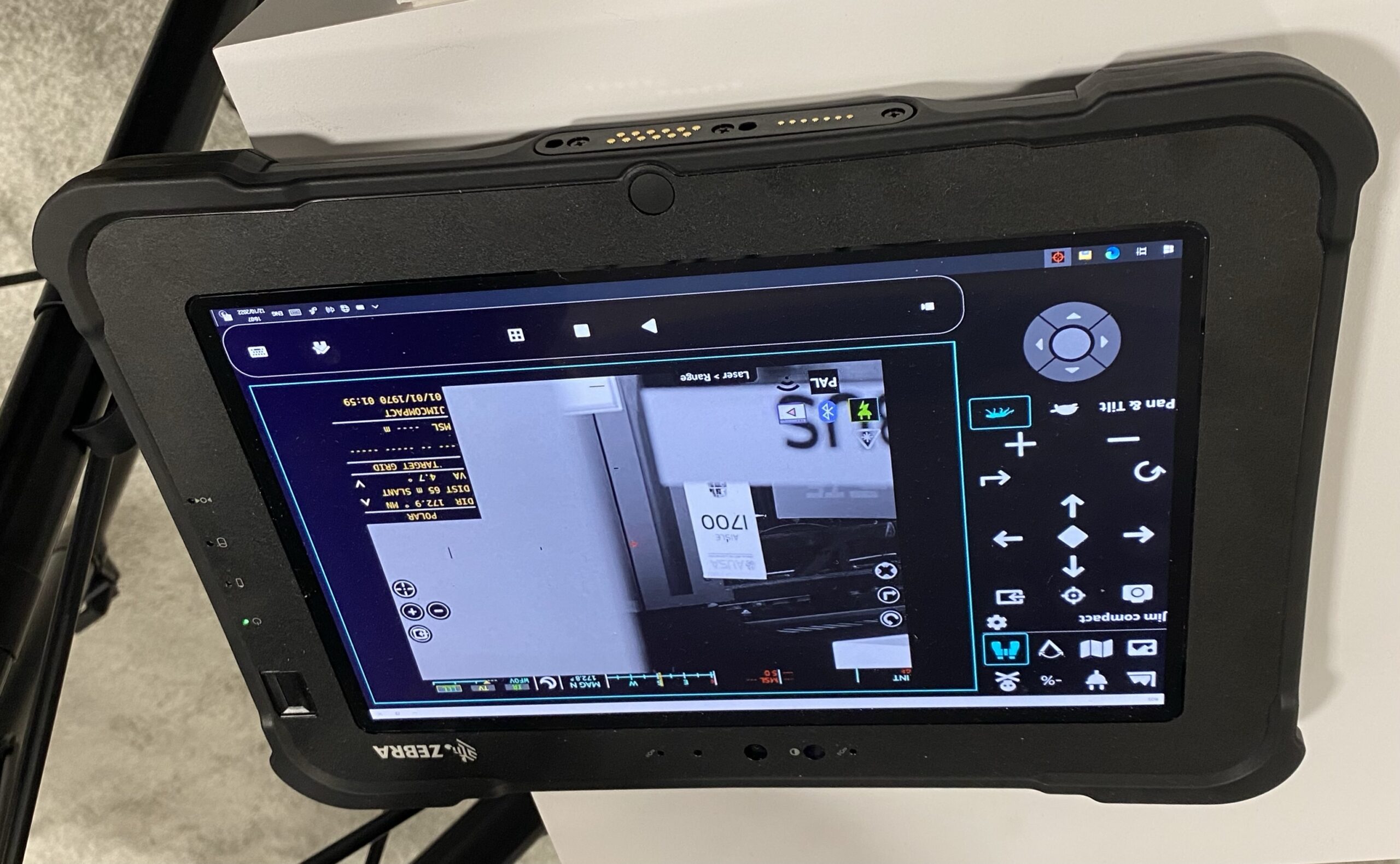
Looks like a CCTV app controlling pan/tilt servos, not rocket science, i made the same thing for less than £10 using an arduino and 2 servos and the tinycam app for my monocular, usefull but not exactly an invention.
Well good for you. It’s too bad we can’t base the entire western world’s defense on the projects you cobble together on the cast off Butler tablet in your mum’s garden shed.