In what may be the coolest thing I saw at SOF Week, Envision Technology made the public debut of their PROTEUS.

Portable Reconfigurable Observation And Targeting Expeditionary Uncrewed System or PROTEUS for short was designed in response to USSOCOM’s drone-in-a-box requirement which envisioned a multi-mode drone system, rapidly transitioning from air to ground use.
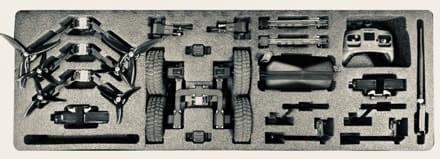
Ultimately, PROTEUS DK40 was selected as a system for the US Army’s PBAS (Purpose-Built Attritable Systems) program. As you can see, it comes in a single deployment case, ready for use.
Relying on Modular Open Systems
Architecture (MOSA), PROTEUS is mission configurable in under 30 seconds to quadcopter, hexacopter, octocopter, or crawler configurations thanks to its snap-on modular arms, wheels, radios, FPV systems, and accessories.
As fielded PROTEUS can be configured as a 5″ or 7″ done or as a crawler. However, Envision also provdes 3D interface files allowing units and developers to design custom mounts, payload integrations, and mission-specific accessories.

What I like about PROTEUS is that it is available now and offers the ability to configure the system as needed for the mission ahead. I know I’m going to date myself here but this is a modern day Erector set for Soldiers, but more plug and play. I’m always amazed at what troops will do with something like this. They will come up with ideas the designers never thought of.
As it has one foot in air and the other in ground robotics, the services can use it as a means to envision what future multi-mode unmanned systems (UXS) may look like and how imperative it is that they share commonalities such as power, comms, command and control, and end effector interfaces.
This will become even more evident as we begin to use larger UXS to serve as motherships to smaller systems.
www.envision-tek.com/unmanned-modular-systems