ABERDEEN PROVING GROUND, Md. — Advanced 3D printing from recycled plastic is an eco-friendly way to strengthen operational readiness, curb supply chain reliance, and improve troop safety, says a top Army scientist — with testing and evaluations on a mobile lab set for next year.

In a collaborative effort with the U.S. Marines, the U.S. Army Research Laboratory has explored new, resourceful ways to salvage plastic waste to integrate with 3D printers, said Dr. Nikki Zander, ARL research chemist.
“We have the [20 ft.] container at Marine Corps Base Quantico,” Zander said. “We’ve got all the extrusion equipment installed. We’re hoping by the end of this calendar year we’ll be able to do a demonstration of the capabilities there.”
The containers include the tools and equipment needed to fabricate 3D items from recycled materials, Zander said. Although the printing capabilities exist, ARL researchers plan to make them more automated, user-friendly, and eventually require less than a day of training for Soldiers in the field.
Right now, researchers are actively scanning parts to build an imagery database for Soldiers to pull from to quickly print parts.
“Three companies are working on making the next generation mobile lab,” Zander said. “We hope within three years we’ll have a prototype from one of those companies, and it will be more robust have more automation capabilities.”
“We’re trying to reduce supply chain dependence by using available materials,” Zander said. “We’re interested in looking at plastic packaging materials we could repurpose to use as a feedstock for additive manufacturing.”

In austere environments, a cache of plastic debris — such as empty water bottles, milk jugs, and yogurt containers — often pile up and cause a logistical burden on Soldiers to dispose of.
With nowhere to go, the garbage is often burned. The smoke releases toxic fumes into the air, and potentially causing respiratory hazards for Soldiers, Zander said.
Although actions to help the environment were “a huge motivation,” for Zander, an avowed environmentalist, the technology does more than provide conservational alternatives for troops. It is also a cost-effective way to help Soldiers be more self-sufficient on the frontlines.
One example of how recycled plastic is used on vehicle radio brackets, Zander said. It takes roughly ten emptied water bottles, and two hours, to fabricate a plastic radio bracket.
The vehicle brackets “commonly break, and usually a new, $200 radio is ordered. The new radio can take many months to get into the field, but, now you can print the part for [the cost of an empty, plastic water bottle] with no wait, and there’s very little statistical difference in the strength of the material.”
“This supports sustainment and the next-generation combat vehicle,” Zander said. “That is because there is a lot of plastic parts that need to be replaced and when you’re in a remote area, and it’s very difficult to get those shipments in.”
Even though some units have conventional 3D printers, their conventional filament must be refilled. Supplying troops with mission-critical items, like printing refills, can take weeks and the shortage can also leave Soldiers vulnerable during transportation.
“If Soldiers run out of conventional filament, then they’re dead in the water,” she said. “I think this technology provides a large level of comfort to know that they don’t need anything outside of what they already have to make the things they need.”
Not all plastic has the industrial strength of water bottles. Other plastics, such as polypropylene, often used as yogurt containers, and polystyrene, used in plastic utensils, are generally too weak to fabricate.
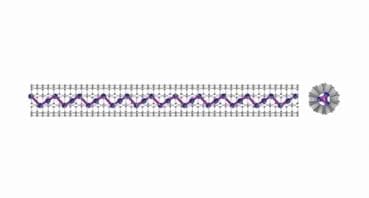
However, those plastics forge a stronger composite material when reinforced with other materials, “When PP is mixed with cardboard, wood fibers, and other waste materials found on military bases — they create a new composite filament,” Zander said. “Giving them the strength to make more durable filaments for 3D printed parts.”
This procedure is called solid-state shear pulverization. During this process, the materials are milled into a twin-screw extruder to form a fine powder that is melted down into a 3D printing filament. Looking ahead, ARL scientists hope to incorporate tire rubber.
“If we’re able to take the waste out of the area, and the burning out of the air and turn it into something useful, that’s win-win,” Zander said.
Story by Thomas Brading, Army News Service
Photos by E.J. Hersom