I’m pretty excited to tell you that SOFWERX, in collaboration with SOF Acquisition, Technology, and Logistics (SOF AT&L) Program Executive Office Tactical Information Systems (PEO-TIS), will host an Assessment Event (AE) 04-07 December 2023, to identify production model solutions for general-purpose multi-role/multi-mission robot systems.
This assessment solicits white papers to describe the current capabilities of off-the-shelf robot systems in the 10-40 lbs weight range. Systems will be reviewed by USSOCOM stakeholders and Subject Matter Expert’s (SME’s) to identify solutions for future participation in the FosUGS indoor presentation/outdoor demonstration that will occur at SOFWERX to provide a pathway to ultimately conduct tests on selected systems for specific cyber, safety, and performance requirements.
Technology desired by USSOCOM is an intelligence, surveillance, and reconnaissance (ISR) general-purpose multi-role/multi-mission robot system in the weight range of 10-40 pounds that has some level of autonomous behaviors or capabilities which reduce operator workload and can operate in all-weather conditions within rural/urban environments. The system must have an integrated electro-optical/infra-red (EO/IR) full motion video (FMV) capability for day and night ISR operations and be payload agnostic to support additional payloads.
The 10-40 lbs range seems to be the one which the services are having the most trouble with. There are lots on micro systems out there (below 10 lbs) and loads of larger robots on the market but this small size seems to be a bit of an engineering challenge, balancing size, capability, and payload.
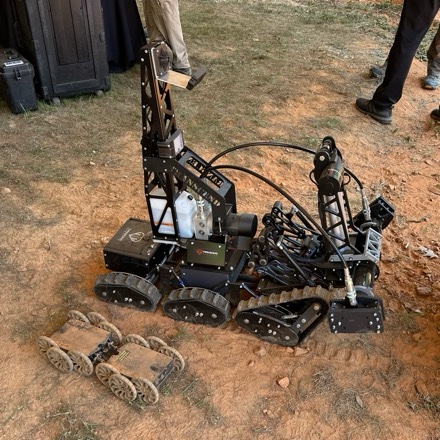
Remember, the robot is the platform and carries tailored, modular mission platforms. A robot with sensors, or weapons built-in becomes a screwdriver rather than a multi-tool and is less desirable due to its limited use. The image below gives you an idea of what I’m talking about regarding size. The larger robot is the Transcend Vantage and the much smaller robot is the Mini Vantage.
Program Executive Office Tactical Information Systems is a newly formed PEO within USSOCOM which combines elements of the old PEO Special Reconnaissance and PEO C4. It is responsible for Technical collection and communication, Integrated sensor systems, Sensitive Site Exploitation, Remote Capabilities; and Tactical Communications. Enterprise C4 systems have moved under the Director for Enterprise Information Systems.
To participate in this AE, submit NLT 20 October 2023 11:59 PM ET here.