Modern Day Marine has announced the cancellation of the 2021 event scheduled for September 21-23 at the Quantico Marine Corps Base due to COVID-19 concerns.

Modern Day Marine has announced the cancellation of the 2021 event scheduled for September 21-23 at the Quantico Marine Corps Base due to COVID-19 concerns.

In partnership with our dealer U.S. Elite, Arrowhead Equipment announces that its products have now been added to the General Service Administration (GSA) schedule.
This allows for Federal, and participating state/local governments to purchase Sitka Arrowhead products quickly and easily. From base-layers to Wet Weather Protective gear, Arrowhead Equipment’s Modular Combat Layering system comprises of pieces that are both Berry and/or TAA compliant.
Focused on developing and manufacturing purpose-built technical products, Arrowhead Equipment is a natural extension of SITKA Gear. Founded upon SITKA Gear’s DNA and considered approach to design, the program leverages the materials science expertise of Gore to provide purpose-built solutions for the Global Special Operations Forces end-user.
Qualified buyers go here.
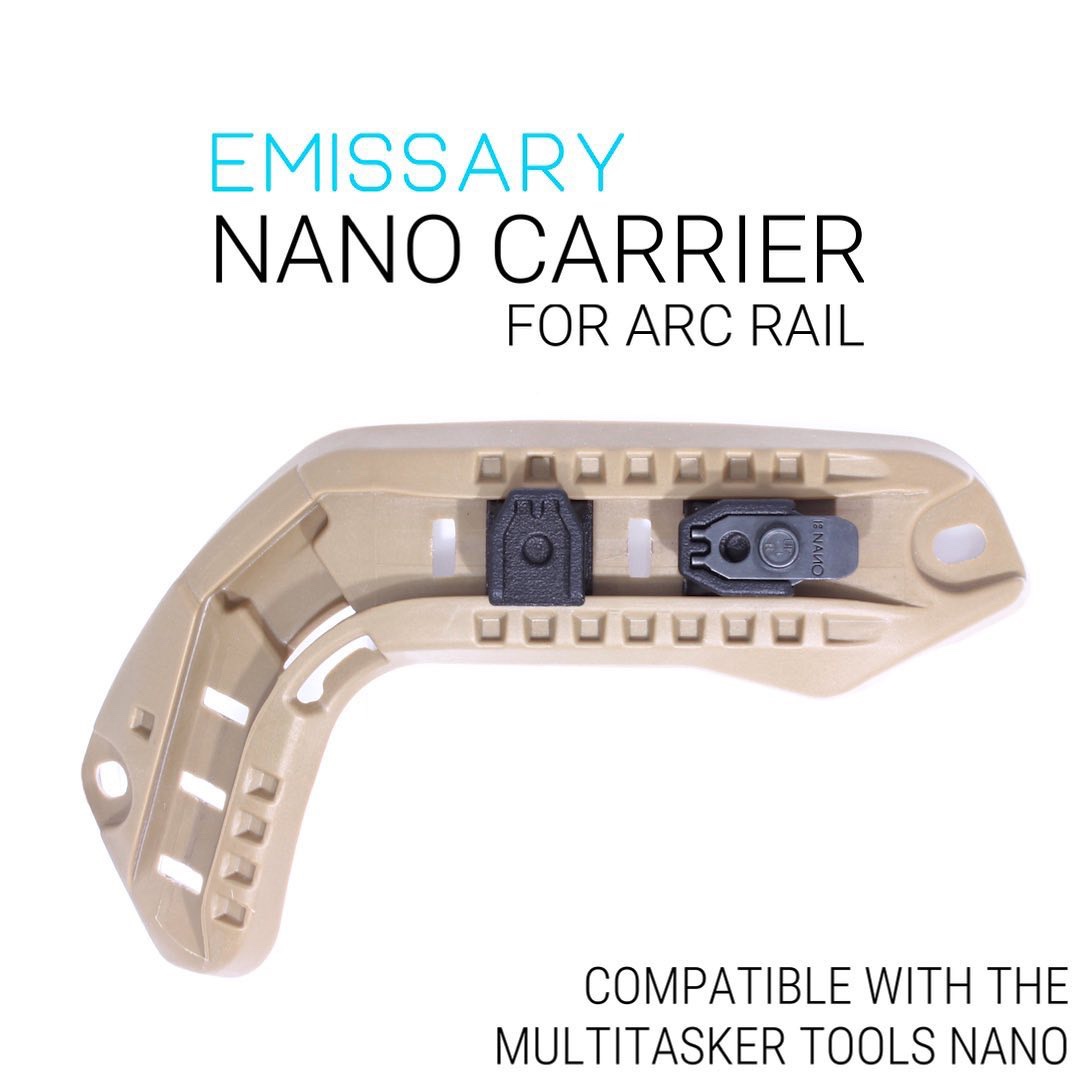
This NANO Carrier variant for the ARC Rail was a special request that they decided to bring to everyone. It can be rotated 90° giving you four position options that the MultiTasker NANO is accessible from.
It can be mounted to the Helmet ARC rails found on Ops-Core, Crye Precision and many other ballistic/bump helmets.
Right now they have three NANO Carrier variants in development:
MLOK, Picatinny and ARC Rail.
All three versions are coming along well and they hope to launch them all together.
This week’s Friday Focus, we’ll take a look at a FirstSpear staple item. The line one belt is our most popular everyday belt! Borrowing its name from an old NSW term for the first level of clothing or gear, the Line One Belt has amazing tactical performance that maintains the high level of comfort and mobility usually associated with leather.

“Sizing is perfect, still looks new after almost two years of daily use. Sturdy enough to do everything from CCW to multiple day courses.” —Online Review

“Having used this belt for the last several years, it still looks like new. It remains very stiff, as it was designed, holds up to multiple training days per year, as well as being worn almost every day with a holster and magazine pouch. Not a better EDC belt on the market as far as I am concerned.”
— Online Review
Urethane covered nylon provides superior strength and weather-resistance. This belt won’t crack, peel, or become stiff in frigid temperatures. Specially tempered, non-slip coating eliminates “break-in” time and allows for leather like flex, yet it is impervious to sweat and water and will not stretch or lose its original shape. The Line One Belt is an excellent platform for concealed carry or for just keeping your pants up with style.
Available in Rich Mahogany, Black, Manatee Grey and Tan.
For more information, check out www.first-spear.com/line-one-belt-biothane-r.
COAST GUARD STATION INDIAN RIVER INLET, Del. (AFNS) —
Imagine being in a yellow life raft in the middle of the ocean after surviving an aircraft incident. There is an aircraft flying several hundred feet overhead. The best chance of being rescued lies in an ability to use the issued survival equipment to signal the position to the aircraft.

While this situation might seem far-fetched, it is a very real possibility for aircrew members flying out of Dover Air Force Base, Delaware.
For this reason, members of the 436th Operational Support Squadron Survival, Evasion, Resistance, Escape flight partnered with the 3rd Airlift Squadron at Dover AFB, Coast Guard Air Station Atlantic City, New Jersey, and Coast Guard Station Indian River Inlet, Delaware, to train local search and rescue procedures during Exercise Castaway.

“The whole idea for Exercise Castaway started with a picture,” said Tech. Sgt. Derreck Day, 436th OSS SERE specialist. “I was conducting a water survival preparation course [that includes] a picture of a 46-man life raft, [where] at 4,000 feet is extremely difficult to spot. Looking at that photo, I thought ‘what is the probability of finding an individual, if not, a whole crew of people in a life raft out in the Atlantic Ocean.’”
The picture Day refers to is a photo taken from a C-17 Globemaster III at an altitude of about 4,000 feet. The raft is nearly impossible to spot with the naked eye. At that altitude, the raft appears to blend in with the ocean waves; an incredible challenge to anyone attempting to locate survivors in the open ocean.

“It’s a photo of the largest life raft we have in our inventory and in that photo you can’t even see the life raft,” Day said. “So looking at that situation, I thought to myself, ‘why not exercise this.’”
During Exercise Castaway, Day and four Airmen from the 436th OSS SERE flight were escorted 5 miles out into the Atlantic Ocean by Coast Guardsmen from Indian River Inlet.

“We got to Coast Guard Station Indian River and by the time we broke through the waves out of the inlet, about 4 and a half miles off shore, the 25 mile buoy was reading 5 foot seas and 17 knot winds,” Day said. “I’m very grateful that the Coast Guard was there to provide over watch in case of an emergency.”
Once in place, the SERE crew then prepared their signaling equipment including the combat survivor evader locator radio, sea dye, flare and life raft canopy. This marked the official start of Exercise Castaway.
Day explained their objective was to go through the issued survival equipment, use it, devise tactics, techniques and procedures, and to relay pertinent information to assist the aircrew in spotting them.

Two aircraft crews participated in the exercise: a C-17 from Dover AFB and a MH-65D Dolphin from CGAS Atlantic City. As the acting on-scene commander, the C-17 crew spotted the life raft and relayed location information to the MH-65D for simulated rescue and hoist practice.
“The scenario for the aircrew aboard the C-17 was for them to respond to a simulated downed aircraft call, provide a search pattern, exercise their on-scene commander checklist and take photographs of what’s happening through their perspective,” Day said. “As they role-play on-scene commander, once they spotted the life raft, they notified Coast Guard Station Atlantic City.”

As the C-17 was spotted in the distance, the crew began their series of signaling attempts to the aircrew aboard the aircraft.
“We came in at 500 feet through several passes while the guys in the raft were trying out different signaling techniques,” said 1st Lt. Nicholas Johnson, 3rd Airlift Squadron pilot. “Then we climbed to higher altitudes to see how clear we can see those visuals at different altitudes and capture data on what would be the best altitude to ingress to try and find guys on the ground.”
Spotting the life raft became a challenge on its own due to the high-speed winds and tall waves. It took a couple passes before the aircrew spotted the life raft.
“At first there were no visuals,” Johnson said. “It was just them on the raft and we had to find them. Even at 500 feet, which is pretty close to the ground, we weren’t able to see them until we were right on top of them.”
With each pass over the raft, the aircrew then ascended to higher altitudes to observe the effects altitude had on spotting the life raft. The higher they climbed, it became increasingly difficult to keep track of the life raft.
“There are a lot of lessons learned that I plan on relaying to the aircrew that could find themselves in that situation,” Day said. “It was amazing to see the interaction between all participating agencies and record all the success and failures that happened during the exercise.”
During flight operations, there is always risk involved. For Dover AFB, being prepared in case of a real world incident means readiness and tactful knowledge of basic water survival and search and rescue principles. Knowing how to signal aircraft aiding in rescue while also experiencing the dangers of open water is paramount to survival. The SERE team here is dedicated to ensuring aircrews have the skills needed to give themselves the best chance of survival.
Stories and some photos by Senior Airman Marco A. Gomez, 436th Airlift Wing Public
Some photos by Senior Airman Faith Schaefer
ANOKA, Minnesota – August 24, 2021 – Federal Ammunition is proud to announce its new Federal Premium High Over All (HOA) shotshell product line. HOA offers competitive shooters the best plastic shotshell product on the market. The product has been featured at regional and national events and will be showcased again at the Minnesota HOA State Championship Shoot held at Minnesota Horse and Hunt Club in Prior Lake, Minnesota, August 27-29.

“We are excited to build on the great momentum of this new product line. Competition shooters have been asking for a new competition load from Federal—and we’ve delivered with the best ever. ” said Jason Vanderbrink, Federal Ammunition’s President. “Top shoots across the country have been buzzing about our new HOA product and we look forward to rolling it out over the next months leading up to the National Sporting Clays Tournament in Texas.
Federal Premium High Over All leaves a trail of shattered targets in its wake and more reloads per shell. It’s hard, high-antimony lead payload and exclusive one-piece Podium wad produce the most consistent patterns, while the solid brass head and tapered, one-piece hull make reloading easier than ever. From beginners to elite and all shooters in-between, it’s the ultimate load for anyone wanting to knock more clay targets at the range. The complete list of sixteen 12-gauge, 2 3/4-inch offerings have a wide range of payloads, velocity, dram and shot sizes to accommodate the needs of any discipline of competitive shooting. A full line up of sub-gauge offerings is set to follow in 2022.
During the Minnesota HOA event, several Federal engineers, ambassadors and shooters will be on hand to showcase the product. Competition shooters on Team Federal which include Derrick Mein, Janet McDougal, Cameron Hicks, Curt Halbakken and Gregg Wolf will be there to compete in the championship.
For more information on all products from Federal or to shop online, visit www.federalpremium.com.
TAMPA, FL, August 24, 2021 – Meopta Sport Optics is excited to introduce the new Optika5 2-10×42 PA riflescope with side parallax adjustment (PA) from 10 yards to infinity. This exceptionally versatile riflescope delivers razor-sharp image focus at close ranges – a feature rimfire and air rifle enthusiasts will appreciate – and gives hunters and target shooters the ability to dial in the focus at longer ranges.

Engineered to withstand heavy recoil, this newest addition to the Optika5 series is also designed for superb performance on centerfire, muzzleloader, and slug guns – making it an excellent choice for hunting a variety of species from varmints to big game. It can be used with the Strelok Pro ballistic app and is built tough enough to handle the extreme bi-directional recoil of spring-piston air rifles.

The Optika5 2-10×42 PA features a 1-inch main tube diameter, 5x zoom, zero-reset turrets, and advanced lens coatings for true color representation and unsurpassed low-light performance in its class. Meopta’s proprietary MeoBright lens coating delivers maximum light transmission per lens surface while suppressing reflection and glare, giving hunters and shooters the advantage of crisp images with optimal contrast. Images are clear even in the rain thanks to Meopta’s MeoDrop hydrophobic lens coating which aggressively repels water and makes it easy to wipe off grease, skin oils, and dirt.
Capped hunting turrets are made of rubber-armored metal for the perfect combination of durability and functionality. The rear-facing magnification display allows for easy viewing of the power setting from behind the scope, and the zoom ring comes with a throw lever for quick adjustment of the power setting in the field or on the range. Windage and elevation adjustments are ¼ MOA. Two second focal plane reticles are available – Z-Plex or Z-Plus.
The Optika5 series is also available in 2-10×42, 3-15×44, 4-20×44, 4-20×50, and 4-20×50 RD models. Reticles options for the 4-20×50 RD with illuminated red dot in the center are Z-Plus RD or BDC 3 RD.
All Optika5 scopes are made of aircraft-grade aluminum alloy and feature:
– One-piece tube design
– Zero-Reset turret for quick return to zero
– Zoom ring with throw lever
– Rear-facing zoom display for easy viewing of power setting from behind the scope
– MeoBright anti-reflective lens coating
– MeoShield anti-abrasion lens coating
– MeoDrop hydrophobic lens coating that repels rain, dust, and grease
Like all Meopta optics sold in the United States, Optika5 riflescopes are backed by Meopta’s Lifetime Transferrable Warranty.
Retail Pricing: $349.99
GARLAND, Texas, Aug. 26, 2021 // — Texas-based advanced manufacturing company True Velocity has announced their partnership with Virtus Ammo to act as the first licensed distributor of their composite-cased .308 WIN ammunition in a move that will bring the revolutionary rounds to store shelves and in the hands of discerning shooters. Additional calibers and configurations are expected to follow in subsequent months.
“This is a very important step in the process of making sure the public can see our ammo in person and expand access to our products,” said True Velocity Chief Sales and Marketing Officer Pat Hogan. “Virtus is an aggressive partner, and we look forward to expanding our business with their help.”
Headquartered in Salt Lake City, Utah, Virtus carries a large selection of modern-day ammunition scalable and adaptable to all calibers. The company provides rounds for all shooting activities including target, sport, personal defense, and hunting and acts as a liaison between True Velocity and dealers across the United States.
“Without a doubt, True Velocity’s composite-cased ammunition gives us the closest example of what the future of shooting looks like,” said Darren Crockett, Chief Operating Officer at Virtus Ammo. “Being named as the first distributor of this history-making product is an exciting opportunity for our team.”
True Velocity rounds provide significant advantages over traditional brass rounds, including reduced heat transfer to firearms, leading to longer chamber life and decreased throat erosion. These rounds boast sub-MOA accuracy and extreme consistency in muzzle velocity, thus providing serious shooters with an extraordinary performance advantage.
To learn more about Virtus Ammo, shop True Velocity ammunition, or become an official dealer of the innovative product, visit www.virtusammo.com.