I sat down with my friends at 5.11 Tactical a few weeks ago to discuss some gift ideas for SSD readers. My goal was to present a small cross section of products, with varying functions and prices. I know it’s a tough year and I wanted to be able to suggest value. We ent over their vast catalog and narrowed it down to five items that most anyone can use. This week, we’ll present one of these products each day.
Today it’s the LV10 Sling Pack 2.0. This 13 liter bag will accommodate your off-body EDC needs whether on the job or just running around town.
There’s plenty fo room to
organoze your gear including smaller laptops and concealed carry of a firearm. The main compartment is lined with loop material, laser cut to accommodate MOLLE pouches. The laptop sleeve is padded and the rear CCW comortment features their “hot pull” system, loop panel, and removable holster retention strap. The fleece top zipper pocket is perfect for eye pro storage. You’ll
also find a water bottle pocket and there’s even a channel for flex cuffs at the rear.
The color is a nice shade of Green called Python.
Today is also Cyber Monday, so you also get a deal on this bag at 20% off.
Earlier this year the United States Special Operations Command selected the L3 Harris AT-802U Sky Warden as their new Armed Overwatch aircraft. It has now been designated as the OA-1K. Aircraft officianados will recognize the OA designation which identifies the combined Observation Attack role.
The decision to reuse model 1 is an odd choice considering 7 is the next number in line for Observation aircraft and 14 is next up for Attack aircraft. It seems that they are attempting to assert some sort of SOF aviation heritage on this completely new airframe by reusing the model 1 designation shared with the Skyraider and assigning variant K to the Sky Warden.
Thousands of Douglas A-1E, A-1H and A-1J Skyraiders were operated by the US from 1946-1973 with significant service in AFSOC’s forebears, the Air Commandos, during the Vietnam War.
The Armed Overwatch program provides SOF with dedicated Close Air Support, precision strike, and airborne intelligence, surveillance, and reconnaissance (ISR) from austere locations in a permissive environment.
USSOCOM plans to procure 75 OA-1Ks and form then into four operational squadrons of 15 aircraft each and an additional 15 for use in training. Special Operations Squadrons operating U-28 Drago and MC-12W Liberty will replace their aircraft with OA-1Ks. However, AFSOC plans to keep some Dragos in service.
Introducing the new MGL “Renegade” belt series to replace the Victory Aegis belts. This buckle is made of Aerospace Type 3 Hardened Anodized Aluminum. Sliding bar assembly made of Stainless Steel. Anti-slip grooves cut into the sliding bar to prevent slippage. Buckles weighs a mere 2.1 ounces. Available this week. Black anodized and Burnt Bronze (cerakoting over the anodizing) available, clear anodizing inbound soon.
The Seawing Supernova are like the MultiCam of fins. If you understand camo, you know that MultiCam is a camouflage pattern developed for usage in a variety of settings. It is said it can be used in 70% of the world. When it comes to frog and alternate kicks, the new twin-tip winglets increase control and markedly improve maneuverability. I started using the Supernovas a couple of months ago and noticed a difference immediately. I felt like I had a lot more maneuverability than with conventional fins. It also feels like what you expect a great dive fin to feel, but without the weight and, honestly, a lot more flexibility on the kicks, Frog, Reverse, Scissor or Flutter.
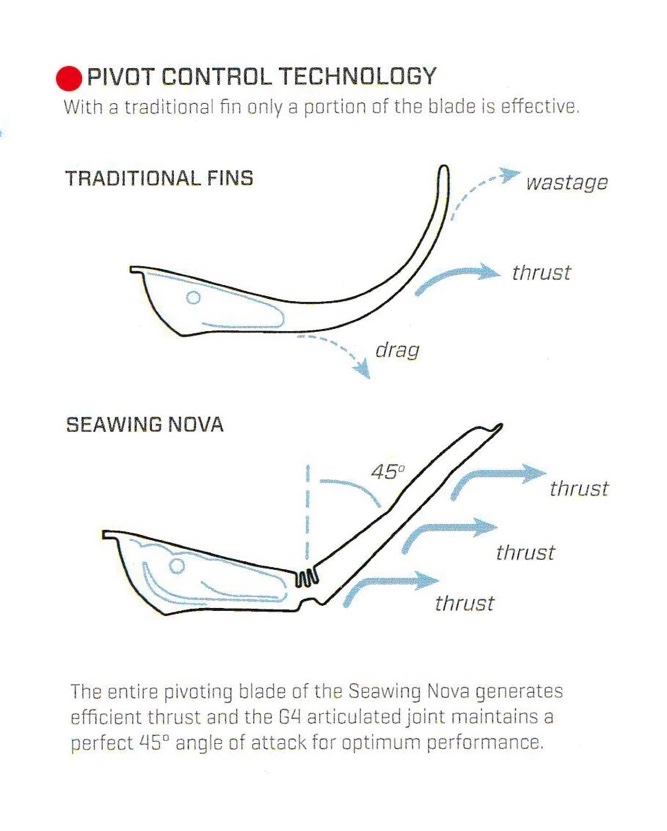
A diving fin needs power, and the Seawing Supernova has it. The fins are designed with Pivot Control Technology. The blade is pre-set in the 40º to 50º range, which is the appropriate angle of attack for the blade and ideal for translating kicks into forward propulsion.
The blade’s revolutionary flexible Auto-Adjust center panel coordinates with this hinge mechanism to adjust the angle of attack by counter-pivoting in response to the force of the kick. So, what does that all mean? On a traditional paddle fin, the harder you kick, the more the blade bends. That means a soft fin will achieve the ideal 45-degree angle when kicked gently but will over-bend and lose thrust when kicked hard. On the other hand, stiffer fins achieve that ideal 45-degree angle when kicked hard but remain too flat to be efficient when kicked gently.
Consequently, both types require the diver to compromise their kicking style to get any efficiency out of the fin.
When you are fining, you can kick so hard that it will bend the blade so far back that it can “technical” pull you backward; this offers a softer angle of attack for comfort while lightly kicking, a more aggressive angle of attack when powerfully kicking, and anything in between. New twin-tip winglets improve control and maneuverability when doing frog and alternating kicks.
The Seawing Supernova, winner of the prestigious Red Dot Award for product design, is a remarkable improvement over the Seawing Nova in terms of performance, construction, fit, and versatility. It also features a cutting-edge blade shape that generates significantly more power, speed, and maneuverability.
The Seawing Supernova also has a novel two-piece design, with the blade and foot pocket molded separately, is made of quality Monprene® for maximum durability, and breaks down effortlessly for transport. This will also allow you two change your blades as SCUBAPRO designed more. The Seawing Supernova’s open heel foot pocket has an updated heavy-duty bungee strap that enables micro-adjustments to accommodate various boot types and extended grip pads that improve non-skid traction on wet surfaces. It is sold as an open heel set with a foot pocket and blade already built.
Additionally, the two-piece construction enables the option of a full foot pocket in place of the usual open heel foot pocket for barefoot diving. You may quickly get ready to hit the water by disassembling the fin’s Socket-Lock Connecting System, replacing the open heel foot pocket with a complete foot pocket, and then reassembling. The entire foot pocket also has a re-profiled heel-retention cup to reduce slippage and chafing and is made of superior Monprene®
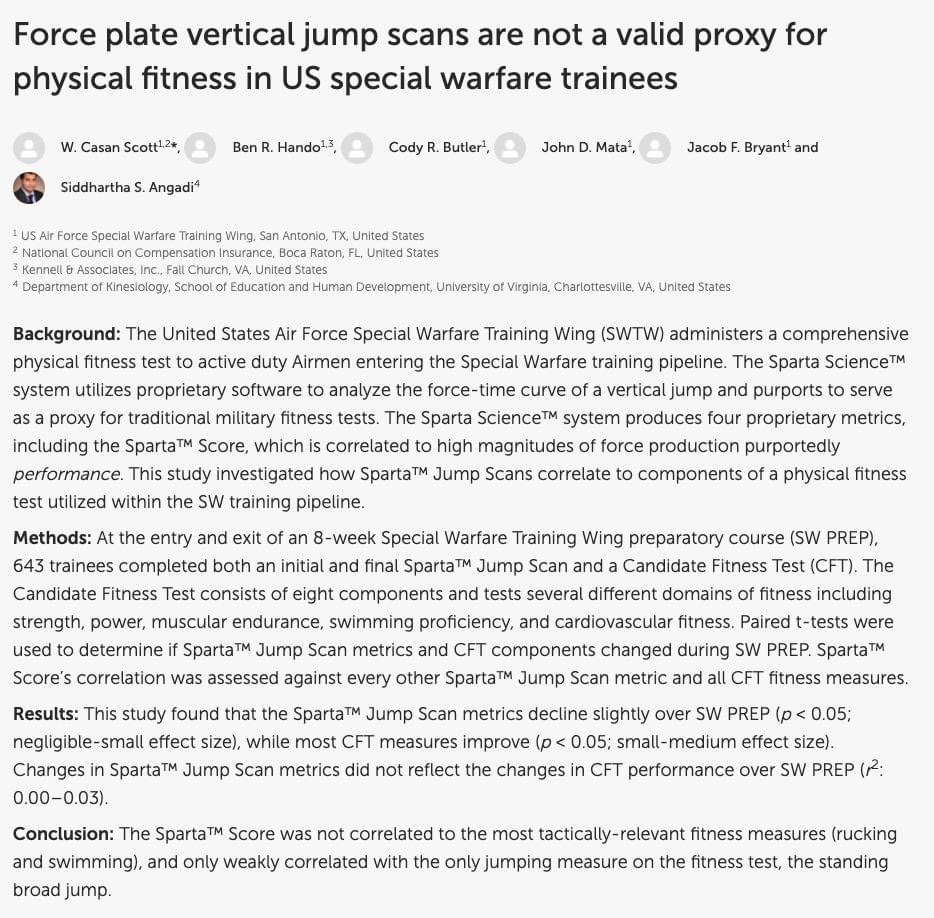
Members of the Air Force Special Warfare Human Performance Support Group’s Research Flight recently published an article in a peer-reviewed journal, “Force plate vertical jump scans are not a valid proxy for physical fitness in US special warfare trainees.”
The Research Flight is the only embedded research team in the DoD, tasked with supporting the Special Warfare Training Wing with data driven decisions to identify trends, maximize the effectiveness and reduce injuries within the pipeline.
The technology enterprise Rheinmetall AG has taken a further step on the path to achieving climate neutrality by 2035, its stated goal. Thanks to the Group’s strong commitment and the support of local authorities, last summer a large solar power plant was successfully installed on the roofs of factory halls at Rheinmetall subsidiary Pierburg SA in Abadanio, Spain.
The 1,635 solar modules installed on the roof are now producing solar power. Annual output is expected to be in the region of 730,000 kWh. According to company calculations, this sustainably generated energy will cut the plant’s climate-harmful CO2 emissions by 175 tons annually.
For the past twelve years, the company has been systematically pursuing a long-term action plan in Spain to reduce its climate footprint, having conducted its first energy audit in 2009. Ever since, the company has done its utmost to be an efficient producer while simultaneously protecting the environment and reducing emissions. Over the years, in addition to the latest installation, the company has successfully implemented measures that have also enhanced the efficiency and sustainability of other industrial processes. These include the introduction of a geothermal exchange system, the insulation of pipes, automatic control systems for fan heaters, automatic compressed air control systems and compressed air systems for leak detection, LED technology and intelligent lighting systems (KNX), as well as coolant filtration and briquetting systems.
This year, the plant has won acclaim from various private and public sector bodies for its commitment and ongoing successful implementation of measures to optimize the reduction of CO2 emissions. In 2014 Pierburg in Spain received special recognition from the Energy Department of the Basque Government, and a year later its energy management system was recognized for good practice as part of the EFQM award. And in 2016 the plant won special recognition from the CEBEC, the confederation of the most important companies in the Province of Bizkaia.
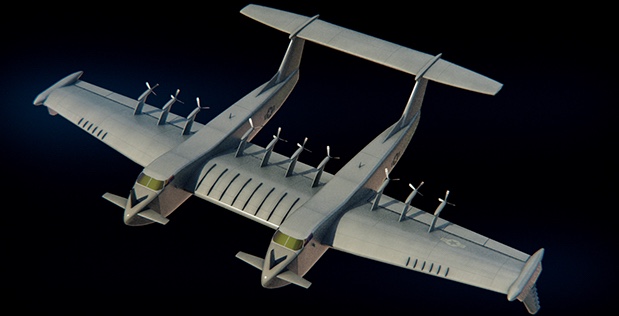
Large seaplane concept envisions extended operations, affordable production, advanced controls
DARPA has launched the Liberty Lifter project to demonstrate a leap in operational logistics capabilities by designing, building, and flying a long-range, low-cost X-plane capable of seaborne strategic and tactical lift. The new vehicle concept seeks to expand upon existing cargo aircraft by proving revolutionary heavy air lift abilities from the sea.
The envisioned plane will combine fast and flexible strategic lift of very large, heavy loads with the ability to take off/land in water. Its structure will enable both highly controlled flight close to turbulent water surfaces and sustained flight at mid-altitudes. In addition, the plane will be built with a low-cost design and construction philosophy.
Although current sealift is very efficient in transporting large amounts of payload, it is vulnerable to threats, requires functional ports, and results in long transit times. Traditional airlift is much faster, but has limited ability to support maritime operations. Additionally, today, such aircraft suffer payload limitations or require long runways.
There is a history of attempting to develop aircraft created to fly with “wing-in-ground effect,” which means the aircraft is flying no more than the length of its wingspan above ground or water. The most well-known examples are the Soviet “ekranoplans.” These vehicles were high speed and runway- independent, but were restricted to calm waters and had limited maneuverability.
“This first phase of the Liberty Lifter program will define the unique seaplane’s range, payloads, and other parameters,” said Alexander Walan, a program manager in DARPA’s Tactical Technology Office. “Innovative advances envisioned by this new DARPA program will showcase an X-plane demonstrator that offers warfighters new capabilities during extended maritime operations.”
To address the shortcomings of existing vehicles and operational concepts, the Liberty Lifter program focuses on addressing three main challenges.
Extended Maritime Operations: Emphasis will be placed on operating in turbulent sea states by creating high-lift abilities at low speeds to reduce wave impact load during takeoff/landing, and innovative design solutions to absorb wave forces. In addition, the project will address risks of vehicle collision during high-speed operation in congested environments. Finally, the aim is for the vehicle to operate at sea for weeks at a time without land-based maintenance activities.
Full-Scale Affordable Production: Construction will prioritize low-cost, easy-to-fabricate designs over exquisite, low-weight concepts. Materials should be more affordable than those in traditional aircraft manufacturing and available to be purchased in large quantities.
Complex Flight and Sea Surface Controls: Advanced sensors and control schemes will be developed to avoid large waves and to handle aero/hydro-dynamic interactions during takeoff/landing.